top of page
Dominic Locurto
Mechanical & Industrial Engineering, University of Massachusetts Amherst

I am currently a Master's Student in the Human Robot Systems Lab at UMass Amherst. The main focus of my current research is to find how we can create devices to help those who suffer from stroke to regain a symmetric walking pattern. I am currently applying to universities for my Ph.D., hoping to further my knowledge of robotics and the effects robots can have on those who need assistance in their lives.
Relevant Experience
Undergraduate Research Assistant
January 2021 - May 2022
Human Robot Systems Lab
Mechanical Engineering Intern
June 2022 - August 2022
Giner, Inc.
Graduate Research Assistant
September 2022 - Present
Human Robot Systems Lab & Kearney Lab
Portfolio
Shown below are the research projects I am currently working on!
Robotic Hip Exoskeleton
This was the first project that I worked on as an undergraduate researcher. The main goal in the custom design of this device was to make it adjustable for users of all body types, as many made in the past do not fit those outside a certain demographic. It was created to be a multipurpose tool to study human gait adaption to external inputs. Thus far, it has been used in studies that involve the effect of an applied stiffness at the hip joint for the rehabilitation of those who suffer from hemiparesis. I was awarded a Massachusetts Space Grant Consortium in the summer of 2021 to assist me with this project.
My Contributions:
-
Mechanical design of multiple components
-
Custom controller creation & testing
-
Human subject experiments, published at IROS 2022


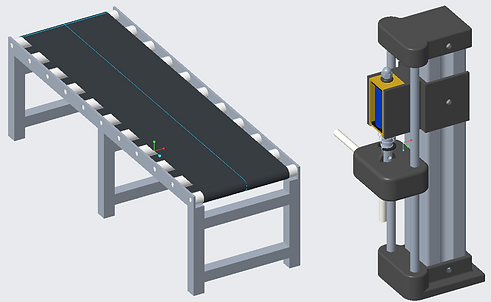
Variable Stiffness Treadmill
Also motivated by gait rehabilitation, this treadmill will allow us to study the effect of foot-ground stiffness on humans. In the past, split-belt treadmill studies have shown spatial adaptation over time, but not kinetic. By applying stiffness under one foot, we hope to see kinetic adaptation (i.e., propulsion and braking) as well. If successful, this device can be used as another way to rehabilitate stroke patients. This project is still currently under development, but the variable stiffness device itself (top picture) was designed and fabricated during the 2021-2022 school year as my group's senior capstone project.

BioClock Robot
I was appointed a Graduate Assistantship for the 2022-2023 academic year to help develop a novel device for biomedical engineering experiments. Tissue engineering is a popular field that allows researchers to find new ways to improve the healing of damaged tissues. However, there is a variable in these experiments that has yet to be taken into account: circadian rhythm. Many bodily functions occur depending on this "clock", which means that tissue growth in culture might also be affected by this. Thus, if we create a way to synchronize all the cells in vitro to follow the same cycle, interesting results can be generated.
My Contributions:
-
Tuning and optimizing PID temperature controller
-
Conceptual mechatronic design
-
Design of a heating system for expanded preliminary testing

OpenSim Simulations
To supplement my research in wearable devices, I performed an OpenSim simulation experiment for a class project. A hip exoskeleton was simulated as a torque actuator acting to assist with hip flexion. The model was allowed to choose when to activate this "exoskeleton" revealing the timings in which this torque can assist walking for both flat ground and different floor angles. The results here can be used to formulate hypotheses for new experiments using the hip exoskeleton in the HRSL.
bottom of page